introduction
Nous présentons dans cette partie notre prothèse mécanique (identique à celle ci dessus) et notre prothèse bionique. Elles ont toutes deux été réalisées par nos propres moyens.
conception d'une prothèse mécanique
présentation
Afin de donner un exemple de prothèse mécanique, nous avons décidé de construire avec nos propres moyens une prothèse mécanique. Cette idée nous est venu suite à une conférence à laquelle nous avons assisté au FabLab de Toulouse.Un Fab Lab est un LABoratoire de FABrication où toute personne, quelque soit son niveau de connaissance, peut venir expérimenter, apprendre ou fabriquer par elle-même tous types d’objets (prototype technique, meuble, objet artistique ou design, objet interactif, etc…). Pour cela chaque membre peut venir utiliser les différentes machines du Fab Lab, apprendre des autres membres ou participer aux différents projets collectifs.
Cette conférence présentait une prothèse dénommé Cyborg Beast. Cette prothèse avait pour particularité d’être entièrement réalisée par impression 3D et d’être totalement Open Source, c’est à dire libre de droits. Nous avons donc téléchargé les fichiers correspondant à cette main sur internet. Possédant une imprimante 3D, nous avons pu, après quelques réglages imprimer chaque partie de la main.
La prothèse repose sur le fait que l'utilisateur peut encore bouger son poignet. Le principe est de transformer la force du poignet en force de fermeture pour la main. Pour cela, on utilise du fil non étirable, responsable de la fermeture et du fil élastique, responsable de la réouverture.
Cette conférence présentait une prothèse dénommé Cyborg Beast. Cette prothèse avait pour particularité d’être entièrement réalisée par impression 3D et d’être totalement Open Source, c’est à dire libre de droits. Nous avons donc téléchargé les fichiers correspondant à cette main sur internet. Possédant une imprimante 3D, nous avons pu, après quelques réglages imprimer chaque partie de la main.
La prothèse repose sur le fait que l'utilisateur peut encore bouger son poignet. Le principe est de transformer la force du poignet en force de fermeture pour la main. Pour cela, on utilise du fil non étirable, responsable de la fermeture et du fil élastique, responsable de la réouverture.
le fil élastique
Le fil élastique est primordial dans cette prothèse. En effet, si le fil n'est pas assez rigide, les doigts ne vont pas pouvoir remonter et la prothèse bougera dans tous les sens. En revanche, si il est trop rigide, les doigts ne pourront pas être pliés et le fil cassera quand l'utilisateur forcera. Après de nombreuses recherches pour trouver le fil idéal, nous avons trouvés l'élasticité convenant à notre montage. Cette difficulté à trouver le bon fil nous a interloqués et nous avons donc décidé d'en étudier l'élasticité.
Pour cela nous avons conçu un sytème de test, visible ci contre. Chaque photo correspond à un poids précis suspendu au bout du fil. La masse affichée correspondra seulement à la masse suspendue. Il faudra ajouter les 16 grammes du mousqueton à chaque masse.
A chaque masse suspendue, nous mesurons la longueur du fil élastique. Le fil au repos mesure 9,8 cm. La rupture du fil a eu lieu avec un peu plus de 4,5 kg.
Pour cela nous avons conçu un sytème de test, visible ci contre. Chaque photo correspond à un poids précis suspendu au bout du fil. La masse affichée correspondra seulement à la masse suspendue. Il faudra ajouter les 16 grammes du mousqueton à chaque masse.
A chaque masse suspendue, nous mesurons la longueur du fil élastique. Le fil au repos mesure 9,8 cm. La rupture du fil a eu lieu avec un peu plus de 4,5 kg.
Vient ensuite l'interprétation des résultats. Pour cela, nous avons tracé un graphique de l'allongement de l'élastique en fonction de la masse, à l'aide du logiciel de tableur Numbers.
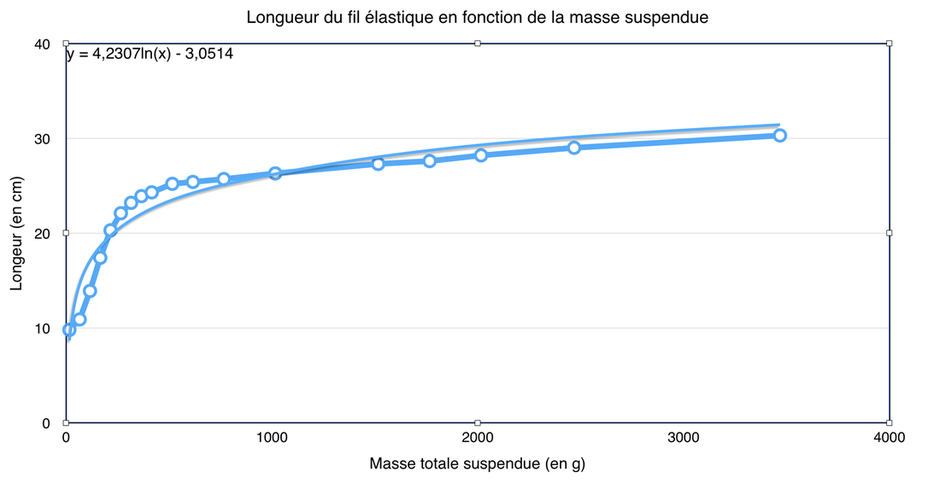
La courbe se superposant à la courbe de mesure est une modélisation de celle-ci. C'est à dire une courbe définie par une équation qui se rapproche le plus possible de la courbe de mesure. C'est en quelque sorte une courbe théorique. Ici, nous avons choisi un polynôme de degré 3 (un polynôme car c'est une somme de produits de x en puissance, et de degré 3 car la plus grande puissance est un x au cube).
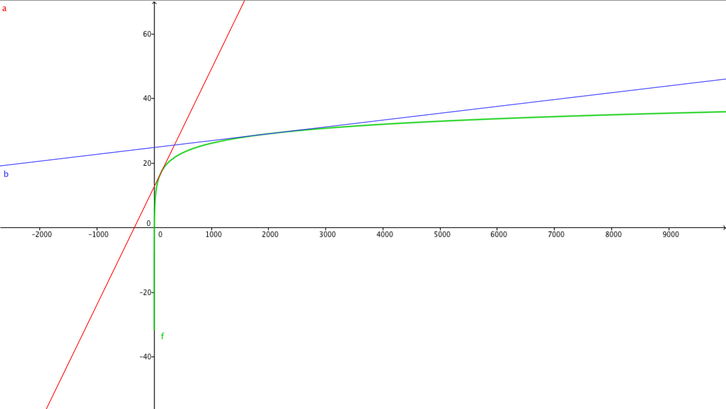
Concentrons nous sur cette courbe. Nous pouvons clairement distinguer deux phases. Une première partie nettement croissante et une seconde, se rapprochant plus d'une constante. Nous allons prendre deux valeurs de masse différentes, représentatif de chaque partie. Le premier: 116 g et le second 2000 g.
Calculons à présent la dérivée de la fonction correspondant à la courbe de représentation en ces deux points.
Nous définissons f(x) = 4,2307ln(x) - 3,0514 (en vert)
On sait que la dérivée de ln(x) est 1/x, d'ou :
A partir de cela, on résout l'équation pour x = 116 et 2000
f'(116) = 0.03647 et f'(2000) = 0.00212
Il ne reste maintenant qu'à déterminer les équations de chacune des tangeantes. L'équation est donnée par la formule suivante :
y = f'(a)(x - a) + f(a)
Calcul pour x = 116 ; f(116) = 17.06 ; On obtient donc y = 0.03647(x - 116) + 17.06
L'équation de la tangente de la courbe au point d'abscisse 116 est donc de: y = 0.03647x + 12.82948 (en rouge)
De même pour le point d'abscisse 2000 où nous trouvons : y = 0.00212x + 24,866 (en bleu)
Concentrons nous sur cette courbe. Nous pouvons clairement distinguer deux phases. Une première partie nettement croissante et une seconde, se rapprochant plus d'une constante. Nous allons prendre deux valeurs de masse différentes, représentatif de chaque partie. Le premier: 116 g et le second 2000 g.
Calculons à présent la dérivée de la fonction correspondant à la courbe de représentation en ces deux points.
Nous définissons f(x) = 4,2307ln(x) - 3,0514 (en vert)
On sait que la dérivée de ln(x) est 1/x, d'ou :
A partir de cela, on résout l'équation pour x = 116 et 2000
f'(116) = 0.03647 et f'(2000) = 0.00212
Il ne reste maintenant qu'à déterminer les équations de chacune des tangeantes. L'équation est donnée par la formule suivante :
y = f'(a)(x - a) + f(a)
Calcul pour x = 116 ; f(116) = 17.06 ; On obtient donc y = 0.03647(x - 116) + 17.06
L'équation de la tangente de la courbe au point d'abscisse 116 est donc de: y = 0.03647x + 12.82948 (en rouge)
De même pour le point d'abscisse 2000 où nous trouvons : y = 0.00212x + 24,866 (en bleu)
Ce graphique montre bien qu'il existe deux domaines d'élasticité. Un où l'élastique s'étire sans poser de problème, l'autre où il resiste. Dans le deuxième cas, il est à son maximum. D'après nos expériences, à partir de 500g, le fil va commencer à résister à l'étirement.
En physique, la partie située en dessous de 500g dans notre cas correspond à la déformation élastique réversible : l'élastique ne se distant pas et revient à sa longueur d'origine. Après 500g c'est le domaine plastique homogène. Si on supprime la force de traction, il y a retour élastique suivant une parallèle à la droite rouge.
En physique, la partie située en dessous de 500g dans notre cas correspond à la déformation élastique réversible : l'élastique ne se distant pas et revient à sa longueur d'origine. Après 500g c'est le domaine plastique homogène. Si on supprime la force de traction, il y a retour élastique suivant une parallèle à la droite rouge.
conclusion
Notre prothèse mécanique fonctionne très bien. Elle nécessite cependant un calibrage très précis au niveau de la tension des élastiques pour être au maximum de ses performances.
Conception d'une prothèse myoéléctrique
INtroduction
A la suite de notre projet de prothèse mécanique, nous avons choisi de fabriquer un électromyogramme qui nous permettra de réaliser le système principal d’une prothèse myoélectrique. Un électromyogramme mesure les tensions générées par la contraction d'un muscle à la surface de la peau.
Un muscle de notre corps va se contracter lorsqu’il est soumis à une impulsion éléctrique (celle des nerfs). En état de contraction, il va à son tour dégager un signal éléctrique. Ce signal peut être récupéré à la surface de la peau, en périphérie du muscle. C’est le but de notre éléctromyogramme.
Les tensions à la surface sont faibles (de l’ordre du dixième de volt) et nécéssitent donc d’être amplifiées afin d'être exploitées.
Pour réaliser notre projet, nous avons choisi de reproduire une carte vendue dans la commerce avec nos propres composants, en suivant le schéma disponible sur internet.
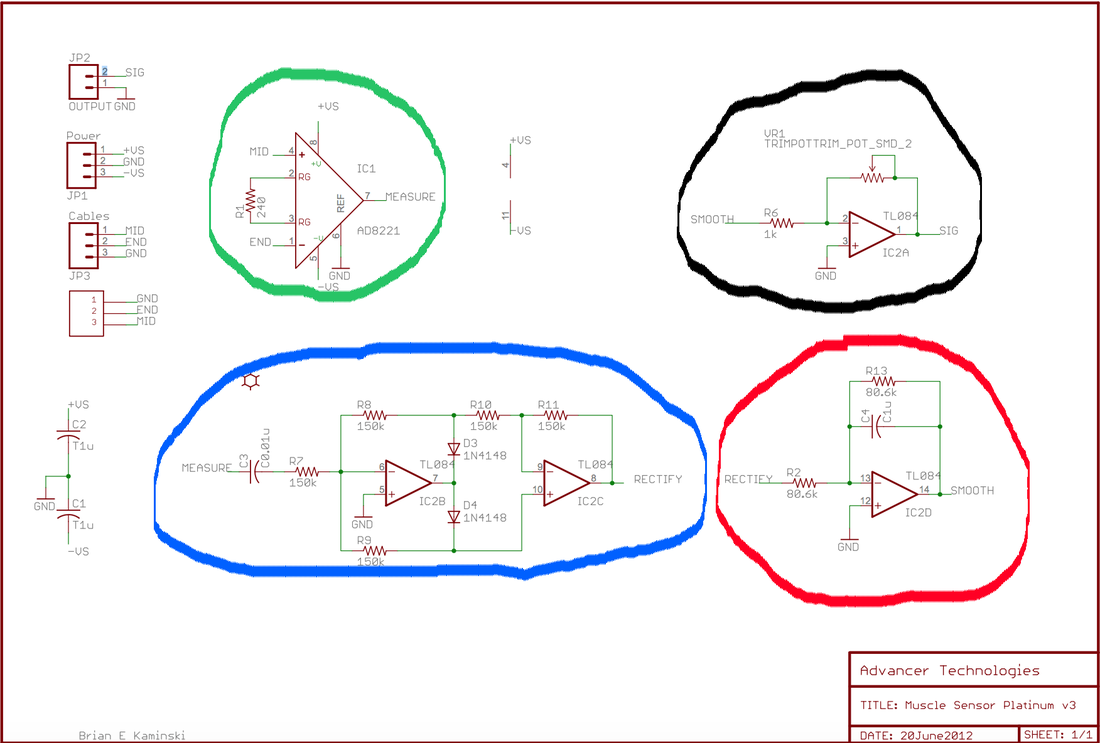
Pour mieux l'expliquer ensuite, nous avons entouré les différents modules.
le rôle du circuit imprimé
Ce circuit imprimé possède deux rôles majeurs : amplification du signal, et transformation du signal alternatif en signal continu.
En effet, la tension électrique est récupérée grâce à des électrodes placées sur la peau. Cette tension est alternative sinusoïdale. c’est à dire qui oscille entre un courant positif, par exemple + 0.2V dans notre cas, et un courant négatif, -0.2V. En analysant le signal avec un oscilloscope, nous obtenons ceci :
En effet, la tension électrique est récupérée grâce à des électrodes placées sur la peau. Cette tension est alternative sinusoïdale. c’est à dire qui oscille entre un courant positif, par exemple + 0.2V dans notre cas, et un courant négatif, -0.2V. En analysant le signal avec un oscilloscope, nous obtenons ceci :
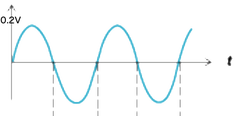
Rappel : un oscilloscope est un appreil éléctronique qui permet de représenter et d’observer un signal électrique sur un écran en fonction du temps.
C’est une sinusoïde. Une forme caractéristique de la tension alternative (le même que dans les prises de courant).
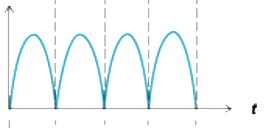
Ce signal est amplifié en passant dans le premier amplificateur (en rouge sur le schéma). En observant ce signal, toujours avec un oscilloscope, on a, à l’entrée du composant et à la sortie :
C’est une sinusoïde. Une forme caractéristique de la tension alternative (le même que dans les prises de courant).
Ce signal est amplifié en passant dans le premier amplificateur (en rouge sur le schéma). En observant ce signal, toujours avec un oscilloscope, on a, à l’entrée du composant et à la sortie :
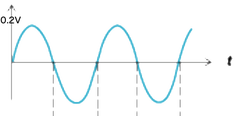
Figure 1
|
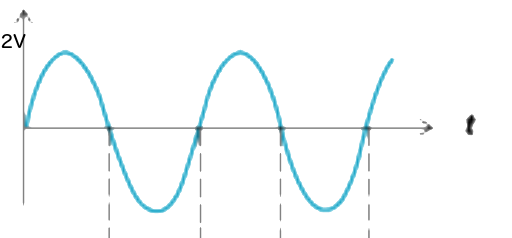
Figure 2
|
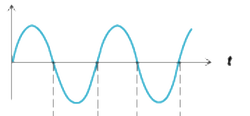
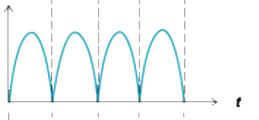
Notre signal est désormais amplifié. Il peut continuer son chemin et passer à travers le premier module (en bleu). Ce premier module, est chargé de redresser le signal. Cela signifie que les tensions négatives vont être transformées en tensions positives. Nous passons donc de notre sinusoïde, en entrée, à ceci, en sortie :
|
|
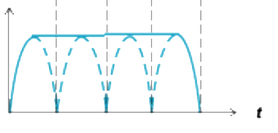
Ensuite, le signal redressé passera dans un second module (en rouge) pour être lissé. Nous regardons le signal d’entrée et le signal de sortie.
|
|
Nous constatons que le signal est presque continu, parallèle à l’axe des abscisses. C’est une caractéristique de tension continue. Pour rappel, la tension continue est une tension qui ne varie pas en fonction du temps.
Le dernier module (en noir) est un second module d'amplification. Il est variable, on peut changer sa valeur.
Nous sommes donc passés d’une sinusoïde de tension faible au départ, à une tension continue exploitable (environ 2V). La prochaine étape est d’exploiter cette tension, pour contrôler un servomoteur, ce que nous allons faire tout de suite à l’aide d’un Arduino.
Le dernier module (en noir) est un second module d'amplification. Il est variable, on peut changer sa valeur.
Nous sommes donc passés d’une sinusoïde de tension faible au départ, à une tension continue exploitable (environ 2V). La prochaine étape est d’exploiter cette tension, pour contrôler un servomoteur, ce que nous allons faire tout de suite à l’aide d’un Arduino.
La connexion à l'arduino
L'eléctromyogramme est ensuite relié à un microcontrolleur. Ici, il s'agit d'un Arduino Uno. On peut voir que le signal de sortie est directement branché sur l'arduino de même que la masse. Le programme en question est chargé de lire ces informations et de les afficher sur le moniteur série.
l'exploitation de l'information
Vient alors deux possibilités d'exploitation de ces données.
La première consiste à lancer un second logiciel en parallèle appelé Processing. Ce logiciel, grâce aux programme précédent, va récupérer les données du moniteur série et va créer un graphique qui évolue en temps réel.
La deuxième solution consiste à traiter directement ces données en reliant le microcontrolleur à un servomoteur. En créant l'algorithme adapté, nous sommes capable d'amener le moteur à un angle donné en fonction de l'intensité du signal. En allant plus loin, on relie ce même moteur à un doigt ou une main réalisé sur mesure en impression 3D, et contrôlons l'ouverture et la fermeture de ce dernier avec le moteur. Cette deuxième solution aboutie à un prothèse myoéléctrique fonctionnelle.
La première consiste à lancer un second logiciel en parallèle appelé Processing. Ce logiciel, grâce aux programme précédent, va récupérer les données du moniteur série et va créer un graphique qui évolue en temps réel.
La deuxième solution consiste à traiter directement ces données en reliant le microcontrolleur à un servomoteur. En créant l'algorithme adapté, nous sommes capable d'amener le moteur à un angle donné en fonction de l'intensité du signal. En allant plus loin, on relie ce même moteur à un doigt ou une main réalisé sur mesure en impression 3D, et contrôlons l'ouverture et la fermeture de ce dernier avec le moteur. Cette deuxième solution aboutie à un prothèse myoéléctrique fonctionnelle.
Conclusion
Notre prothèse bionique fonctionne parfaitement. Avec plus de moyens nous aurions sûrement pu fabriquer un modèle réellement utile à une personne dans la vie de tous les jours. Malheureusement, nous ne disposons pas des matériaux nécessaires (fibres de carbone, servomoteur petits et puissants, ...).
